Programarea automatelor programabile folosind limbaje bazate pe blocuri
funcţionale.
Introducere
Limbajele de programare a automatelor programabile
(AP) bazate pe blocuri
funcţionale (FBD – functional block diagram) fac parte din
categoria limbajelor grafice şi sunt normalizate prin standardul IEC
1131-3
Aceste limbaje specifică în mod grafic
comportamentul unui program prin intermediul unor funcţii, acestea fiind
reprezentate sub forma unor blocuri grafice (numite blocuri funcţionale - BF) interconectate şi care
comunică între ele prin intermediul unor semnale. În limbajele evaluate
mai multe blocuri funcţionale interconectate pot fi reprezentate printr-un
alt bloc ceea ce permite o descriere ierarhizată pe mai multe niveluri.
Pentru a realiza comportamentul general, toate
blocurile sunt conectate între ele.
Circulaţia semnalelor în cadrul unei scheme
cu FB este unidirecţională şi se face conform următoarelor
reguli:
- semnalele circulă de la
intrările schemei către intrările BF sau ieşirile schemei
- semnalele circulă de la ieşirile
BF către intrările celorlalte BF sau către ieşiri.
Evaluarea unui program scris folosind FB se
realizează conform următoarelor reguli:
- un element este executat o dată ce au
fost calculate toate semnalele de intrare pentru acel element
- un element este complet evaluat atunci
când au fost calculate toate semnalele de ieşire ale acestuia
- evaluarea unei scheme cu BF se încheie
atunci când toate ieşirile schemei au fost calculate.
Automatele programabile din
seria ALPHA
AP din seria ALPHA permit realizarea unor comenzi
flexibile cu aplicaţii în industrie, pentru automatizarea serviciilor
proprii unor clădiri sau chiar pentru realizarea unor automatizări
casnice.
AP ALPHA acceptă la intrare semnale digitale
sau analogice şi furnizează la ieşire semnale digitale. Ele pot
fi programate prin intermediul panoului frontal sau folosind programul
AL-PCS/WIN-E. Programarea acestor automate se realizează folosind
programarea cu blocuri funcţionale.
În continuare, programarea AP folosind blocurile
funcţionale este exemplificată pentru cazul AP ALPHA şi pentru
limbajul specific acestora.
Tipurile de blocuri
Într-un program ce utilizează blocuri funcţionale se pot utiliza
5 seturi de elemente:
· intrări: în
funcţie de tipul AP, acesta poate avea 4, 6 sau 12 intrări. Acestea
pot fi atât intrări digitale cât şi analogice. Intrările sunt
notate cu I01-I06.
· taste ale panoului frontal: acestea sunt notate cu K01-K08 şi permit introducerea datelor în
zona de date a programului, deplasarea prin meniuri şi program,
selectează opţiunile de programare sau pot fi folosite ca
intrări suplimentare în timpul funcţionării AP.
· biţii de memorie a sistemului: aceştia por furniza valori predefinite ale semnalelor şi informaţii despre
erorile din sistem. Biţii de memorie sunt notaţi cu M01-M05.
· ieşiri: acestea
sunt digitale şi permit comanda elementelor de comutare de tip releu sau tranzitor ce pot fi introduse în schemele electrice de
comandă. Acestea sunt notate cu O01-O04.
· blocurile funcţionale: acestea sunt elementele de bază ale programului. Cu ajutorul lor
informaţiile primite de la intrări, taste ale panoului frontal
şi biţii de memorie sunt prelucrare fiind elaborate comenzile
transmise la ieşirile AP.
Toate aceste elemente, alcătuind o
diagramă bloc funcţională, trebuie să fie dispuse pe o placă de bază având
intrările în stânga şi ieşirile în dreapta. Acest cadru mai
poartă numele de zonă de conexiuni.
Elementele software-lui AL-PCS/WIN-E de programare
a AP folosind FB sunt date în Fig.
1.
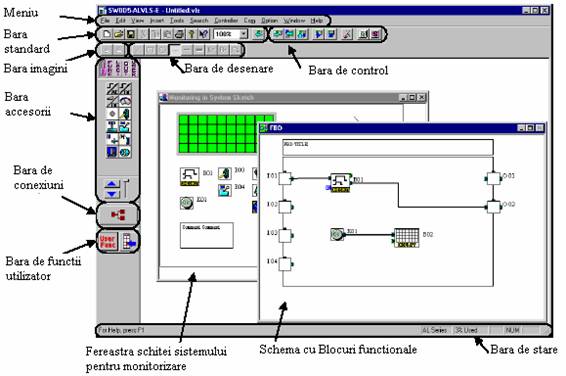
Fig. 1
·
Bara
de meniu conţine meniurile programului.
·
Bara
standard conţine butoanele pentru comenzile standard: “New”,
“Open”, “Save”, “Cut”, “Paste”,“Print”, “About”, “Help”, “Zoom” şi “Read from Controller”.
·
Bara
imagini conţine butoanele pentru “Import” şi “Export” imagini în
fereastra care conţine schiţa sistemului.
·
Bara
de desenare conţine butoane pentru comenzi de desenare: “Line”, “Rectangle”, “Oval”, “Thin”, “Medium”, “Thick”, “Line Color”, Brush Color” şi “Align Drawing Objects”.
·
Bara
de control conţine butoanele prin care se controlează comunicarea
între software-ul de programare şi AP
.Conţine butoanele “Write to
Controller”, “Verify Controller Data”, “Diagnosis of controller”, “Run
Controller”, “Stop Controller”, “Auto FBD Wizard”, “Start/Stop Monitor” şi
“Start / Stop Simulation”.
·
Bara
de accesorii conţine BF pentru intrări, ieşiri, funcţii,
funcţii logice şi funcţii utilizator: “Input Signals”, “Functions”,“Logic Functions”, “Output Signals” şi “User Functions”.
·
Bara de
conexiuni conţine doar butonul pentru selectarea uneltei de conexiune a
BF..
·
Bara
funcţii utilizator conţine butoanele pentru crearea funcţiilor
utilizator: “User Func” şi
“User Func Registration” buttons.
·
Bara
de stare – indică setul de BF utilizate curent şi procentul de BF
utilizate etc.
Table 4.1: Bara de accesorii
|
Bara de unelte |
|
Descriere |
|
Intrări |
|
Conţine
butoane pentru selectarea diverselor tipuri de elemente de intrare şi
biţii sistem. |
|
Funcţii |
|
Conţine
butoane pentru selectarea unor tipuri de BF altele decât cele
corespunzătoare BF logice. |
|
Funcţii logice |
|
Conţine
butoane pentru selectarea BF corespunzătoare funcţiilor logice. |
|
Ieşiri |
|
Conţine
butoane pentru selectarea diverselor tipuri de ieşiri şi biţi
de control. |
|
Functii utilziator |
|
Conţine
butoane pentru selectarea BF definite de utilizator |









Exemplu de scriere a unui
program folosind BF
- Se porneşte programul
AL-PCS/WIN-E.
- Se dă comanda File-New
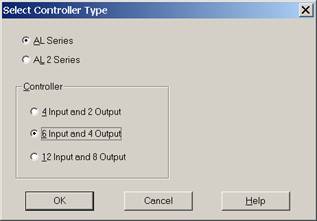
- În fereastra de dialog se aleg
parametrii AP: AL Series, 6 Input
and 4 Output. Se validează
parametri selectaţi apăsând OK.
- Din bara de accesorii se
selectează cu ajutorul mouse-ului elementele
de intrare (IN) şi dintre acestea se alege tipul buton prin clic cu mouse-ul pe icoana corespunzătoare (Push Switch).
În fereastra ce conţine placa de bază (FBD) se plasează butonul în căsuţa corespuzătoare intrării I01 prin clic cu mouse-ul în
respectiva căsuţă. Se face dublu clic pe butonul plasat
anterior şi în căsuţa de dialog care apare, în zona Comment se scrie "Pornire General".
- Se repetă operaţiunea pentru
I02-I06 cu următorii parmetrii:
I02: Push Switch; Comment "Oprire General";
I03: Push Switch; Comment "Pornire Antrenare";
I04: Push Switch; Comment "Oprire Antrenare";
I05: Limit Sensor; Comment "Limita Superioara";
I06: Limit Sensor; Comment "Limita Inferioara";
- Din bara de accesorii se
selectează cu ajutorul mouse-ului
elementele de ieşire (OUT) şi dintre acestea se alege tipul
motor prin clic cu mouse-ul pe icoana
corespunzătoare (Motor). În
fereastra ce conţine placa de bază (FBD) se plasează
butonul în căsuţa corespuzătoare
ieşirii O01 prin clic cu mouse-ul în respectiva căsuţă. Se face
dublu clic pe elementul plasat anterior şi în căsuţa de
dialog care apare, în zona Comment se
scrie "Motor pompa ulei".
- Se repetă operaţiunea pentru
O02-O03 cu următorii parametrii:
O02: Motor;
Comment
"Motor Antrenare";
O03: Light; Comment "Semnalizare ungere";
- Din bara de accesorii se
selectează cu ajutorul mouse-ului bara de
funcţii (FUNC) şi dintre acestea se alege BF de tip bistabil
(SET RESET). În fereastra FBD se plasează BF făcând clic în
interiorul plăcii de bază (zona verde).
- Se selectează bara de conexiuni.
Se fac conexiunile între intrări, BF de tip bistabil si ieşiri. Cu
ajutorul mouse-ului, ţinând apăsat
butonul din stânga al acestuia se uneşte borna de ieşire a
intrării IO1 cu intrarea SET a BF de tip bistabil. Se
uneşte apoi ieşirea intrării IO2 cu intrarea RESET
a BF de tip bistabil. În mod similar se uneşte ieşirea BF de tip
bistabil cu borna de intrare a ieşirii O01.
- Se procedează în mod similar pentru
a se realiza schema din Fig.2
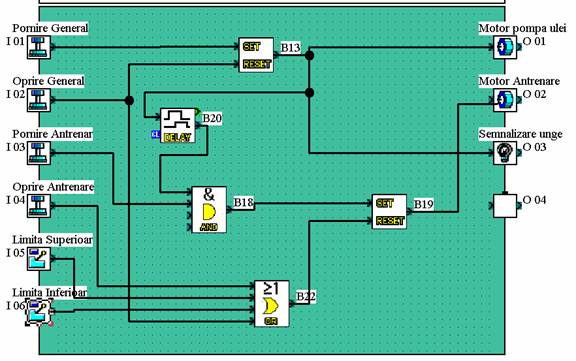 Fig. 2
Fig. 2
În Fig.2 blocurile sunt după cum
urmează: B20 – bloc tip DELAY, B19 – bloc tip SET/RESET, B18 – bloc
funcţie logică AND (ŞI logic), B22 – bloc funcţie
logică OR (SAU logic). Blocurile B18 şi B22 se aleg din bara de
accesorii selectând setul de funcţii logice (LOGI).
Întârzierea blocului B20 se configurează făcând
dublu clic pe icoana corespunzătoare. În câmpul On Operation Delay
se trece valoarea 50 care corespunde unei întârzieri t=50x100 ms=5s.
Schema din Fig.2 corespunde comenzii unei
maşini de găurit care are în componenţă un motor care
antrenează o pompă de ulei pentru sistemul de ungere şi un motor
de antrenare a burghiului. În această schemă funcţionarea
motorului de antrenare este condiţionată de atingerea unei anumite
presiuni a uleiului în sistemul de ungere. Aceasta presupune ca motorul pompei
să fie pornit în avans faţă de motorul de antrenare cu cel
puţin 5 secunde. Becul conectat la ieşirea O03 semnalizează funcţionarea pompei de ulei.
Simularea funcţionării
programului
Pentru simularea funcţionării
programului se apasă icoana Start/Stop Simulation din bara de control sau se selectează
din meniu comanda Controller-Simulation-Start.
Activarea intrărilor se realizează
făcând clic pe căsuţele I01-I06
corespunzătoare.
În modul simulare pentru toate ieşirile BF
este precizată starea în care acestea se află: activ=ON,
inactiv=OFF. Căile active la un moment dat sunt
precizate cu culoarea roşie iar cele inactive cu culoare albastră.
Procedeu experimental
1. Realizaţi o schemă de comandă care să poată fi
implementată folosind un AP Alpha cu 6
intrări şi 4 ieşiri şi care să realizeze comanda a
trei motoare conform următoarelor condiţii:
- motorul al doilea porneşte după
5 secunde după pornirea primului motor;
- motorul al treilea porneşte după
10 secunde după pornirea celui de al doilea motor
- o lampa de semnalizare avertizează
situaţia în care doar unul din cele trei motoare sunt în stare de
funcţionare.
2. Realizaţi o schemă de comandă
care să poată fi implementată folosind un AP Alpha
cu 6 intrări şi 4 ieşiri şi care să realizeze comanda
pornirii unui motor în ambele sensuri de rotaţie. Schema nu trebuie
să permită comanda simultană a motorului pentru pornirea în
ambele sensuri de rotaţie. Pornirea în celălalt sens de rotaţie
nu trebuie permisă decât după 5 secunde de la oprirea motorului
pentru a permite acestuia să se oprească liber.